ヤモリをまねた超極細毛で壁を這うロボットを開発、カナダ大
このニュースをシェア

【1月3日 AFP】カナダの研究チームは2日、ヤモリに着想を得た、壁を這うことができるロボットを開発したことを明らかにした。このロボットは宇宙での活用が期待されており、欧州宇宙機関(European Space Agency、ESA)による性能試験も進められている。
ESAは、非常に小さな脚を備えたこの試作ロボットが、宇宙船の外殻を這って進み、清掃やメンテナンスをする自動機械の先駆けになるかもしれないとしている。ロボットの足パッドは、ヤモリの足先の毛をモデルに開発された、乾燥したマイクロファイバー(超極細繊維)で覆われている。
ヤモリは、足跡を残さずに窓ガラスや壁の表面をすばやく移動する能力を持つことで知られている。ヤモリのこの離れ業は、足の裏に無数に生えた超極細の毛によるものだ。この毛と這い上がる表面の相互作用でファンデルワールス(van der Waals)力として知られる分子間引力が生じる。
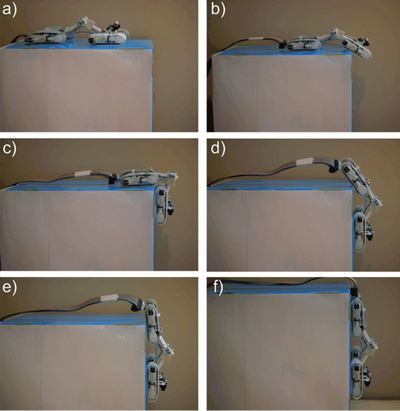
カナダのサイモンフレーザー大学(Simon Fraser University)の研究チームはまずマイクロファイバー製のキャタピラーを備えた戦車のような形の、重量240グラムの「ヤモリロボット」を開発した。その後これを発展させて6本脚の登攀(とうはん)ロボットを開発し、「アビゲイル(Abigaille)」という愛称を付けた。