中国の宇宙ステーション段階で宇宙飛行士の船外活動に初成功
このニュースをシェア
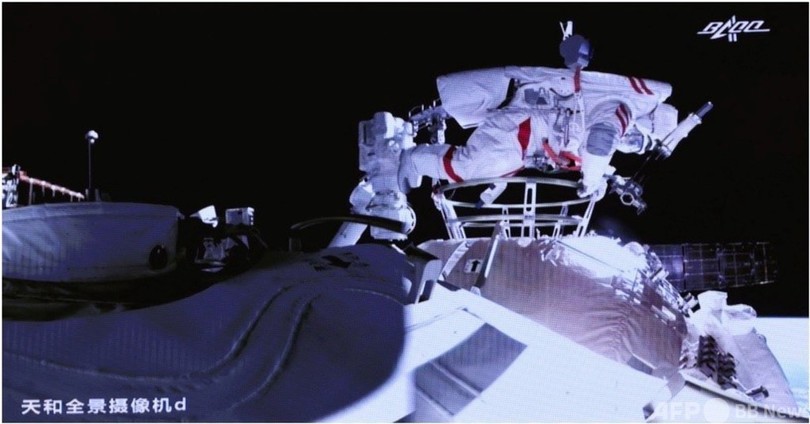
【7月26日 People’s Daily】中国有人宇宙飛行プロジェクト弁公室によると、中国時間7月4日14時57分、約7時間の船外活動を経て、有人宇宙船「神舟12号(Shenzhou-12)」の宇宙飛行士が密接に協力し、船外活動期間の全ての予定任務を終え、宇宙飛行士の劉伯明(Liu Boming)氏、湯洪波(Tang Hongbo)氏は安全に「天和(Tianhe)」コアモジュールに戻った。中国の宇宙ステーション段階で宇宙飛行士が船外活動に成功したのは初めてとなる。
これは、2008年に「神舟7号(Shenzhou-7)」の有人宇宙飛行以来、中国の宇宙飛行士による2回目の船外活動で、宇宙ステーション段階での中国人宇宙飛行士の初の船外活動だ。
今回の船外活動は、宇宙と地球、船内と船外で密接に協力し、船外活動の関連設備の組み立て、パノラマカメラの設置などのミッションを円満に完了させた。中国の新世代船外宇宙服の機能・性能、宇宙飛行士と宇宙ステーション用ロボットアームとのチームワークの能力および船外活動関連設備の信頼性と安全性を初めて検証した。宇宙ステーションの後続の船外活動の順調な実施のための重要な基礎が築かれた。
そのうち、宇宙ステーションのコアモジュールのロボットアームは中国航天科技集団五院が開発を総括し、現在同種の宇宙製品の中で最も複雑で、規模が最大で、最高の制御精度の空間知能機械システムだ。主にキャビンの移行、宇宙飛行士の船外活動、船外貨物の運搬、船外状態の検査、船外大型設備のメンテナンスなどの8分類の軌道上任務を負っている。コアモジュールのロボットアームは伸ばすと10.2メートルにもなり、最大25トンの重量の積載が可能で、宇宙ステーションミッションの「力持ち」と言える。
宇宙ステーションのコアモジュールのロボットアームは中国初の長期にわたる宇宙軌道上での動作が可能で、その肩に3つ、肘に1つ、手首に3つ、計7つの関節が設置されている。関節はそれぞれ1つの自由度に対応し、まるで人の腕のように、7つの自由度の活動能力を有している。各関節を回転させることで、本体の前後左右の任意の方向や位置のスナップショットと操作が可能になり、宇宙飛行士の船外任務のスムーズな展開のために強力な保障を提供した。
宇宙ステーション用ロボットアームは中国の宇宙事業発展の新分野の一つとなっている。開発チームの努力のもと、中国は大型宇宙用ロボットアームの核心技術を習得し、応用する世界で3番目の国となった。全てのコア部品を国産化し、多くの国家宇宙ロボット業界基準を整備した。
「神舟12号」の乗組員は6月17日に「天和」コアモジュールに入って以来、計画通り各種作業を行ってきた。現在、3人の乗組員の体調は良好で、後続軌道上での飛行期間中に2回目の船外活動を行う予定だ。(c)People’s Daily/AFPBB News





