脳制御型ロボットアームに触覚を追加、機能性2倍に 米研究
このニュースをシェア

【5月21日 AFP】脳の活動だけでロボットアームを遠隔操作し、その指が物体をつかんだ感触を自分自身の手で触れたのと同じように感じられるとしたら──?
世界初のブレーン・コンピューター・インターフェースによって、胸から下がまひした男性の触覚を再現することに成功したとする論文を、米ピッツバーグ大学(University of Pittsburgh)などの研究チームが科学誌サイエンス(Science)に発表した。
研究では、触覚を加えることで視覚だけに頼った場合よりも、四肢まひの人用の補綴(ほてつ、身体の欠損した部分を補う人工物)の機能性が格段に向上することが実証されたとしている。
「感覚皮質にインプラントを埋め込んで脳を直接刺激できるようにしたのは、私が世界で初めてだ」と、ボランティアとして被験者となったネイサン・コープランド(Nathan Copeland)さん(34)はAFPに語った。「まるで自分の手で触っているように感じる」
■「とにかく最高」
コープランドさんは2004年に自動車事故で脊髄を損傷し、四肢を動かせなくなった。ボランティアとして参加した研究で6年前、脳に小さな電極を埋め込む手術を受けた。
ブラシの毛のように並んで配列された2組の電極88個が、体の動きをコントロールする脳の運動皮質まで通じている。コープランドさんのインプラントは、感覚を受信・処理する体性感覚皮質に、追加の電極セットが接続されている点が特徴だ。
論文の共著者であるピッツバーグ大理学療法学・リハビリテーション学部のロブ・ゴーント(Rob Gaunt)准教授によると、人間は物をつかむ際、触覚をごく自然に活用している。そこで研究チームは、脳からの指示を「読み取って」補綴に送るだけでなく、補綴からの感覚を「書き込んで」送り返す「双方向性」のインターフェースを開発した。
初めてロボットアームの触覚を確かめた時のことについてコープランドさんは、「そう、これだと思った。とにかくもう最高だった」と振り返った。
■タスク完了速度が2倍に
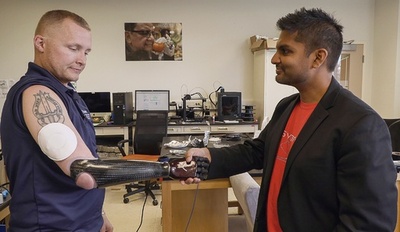
実験では、ロボットアームの触覚センサーを入れたり、切ったりしながら、横に座ったコープランドさんに石や球体といった小さな物体を拾って箱の上に置く作業を繰り返してもらった。すると、触覚センサーが入っているほうが平均で2倍速くタスクを完了でき、コップを持ち上げて中身を別のコップに注ぐといった複雑な動作もこなせた。
コープランドさんは「感覚のおかげで、確信と自信を持って、物をしっかりつかんで持ち上げられると分かった」と話した。
研究チームは、ロボットアームをさらに改良し、将来的には一般家庭で使える装置にしたいと考えている。
コープランドさんは新型コロナウイルス流行で大学が閉鎖されている間、自宅でブレーン・コンピューター・インターフェースを利用し、タブレット端末で絵を描いたりビデオゲームを楽しんだりしていたという。脳制御が「今では自然にできるようになった」と話している。(c)AFP/Lucie AUBOURG